
The Biomechanical Implications of the Full Roller Motion Shoe in the Equine Distal Limb
Biomechanical implications of full roller motion (self-adjusting palmar angle) shoes in equine palmar foot mechanics: theory, tendon and navicular orientation, and vectorial kinetics through stance phase.
Author: Mark Caldwell PhD., FWCF., Niel Madden FWCF,. & Ronald Aalders *
Scientific Horseshoeing Ltd. Newcastle Road, Talke, Staffordshire. UK. ST71SA. E: info@hoofflix.co.uk
* Siogn Podiatry Holland.
Abstract
The full roller motion shoe, also known as the self-adjusting palmar angle shoe, represents a contemporary approach to optimizing breakover mechanics, reducing strain on the deep digital flexor tendon (DDFT), and enhancing dynamic hoof balance throughout the stance phase. This review synthesizes the current biomechanical evidence supporting the theoretical and practical implications of its use, focusing on alterations in ground reaction force (GRF) vectors, tendon angle orientation, and internal hoof structure alignment.
Keywords: equine biomechanics, break-over, palmar angle, navicular bone, deep digital flexor tendon, ground reaction force, farriery, full roller shoe.
Introduction
The equine distal limb functions as a finely tuned biomechanical system where skeletal alignment, tendon tension, and hoof-ground interaction determine performance and injury risk. The full roller motion shoe has been proposed to facilitate a more natural breakover, reducing lever arm forces acting on the distal interphalangeal joint (DIPJ) and associated soft tissues (Eliashar et al., 2004; Chateau et al., 2006).
Anatomical and Functional Overview
The navicular bone (distal sesamoid) sits dorsopalmar behind the short pastern (middle phalanx) and above the palmar margin of P3 (distal phalanx) and provides a fulcrum over which the DDFT passes (Waguespack 2010). The DDFT inserts on the palmar border of P3; its path and the angle at which it contacts the navicular surface (the tendon–navicular surface angle) influence local contact stress (Osborn et al. 2021). The PA — the angle between the solar/palmar surface of P3 and the ground — influences the lever arms of the DIPJ moments and hence the internal forces in the DDFT (see fig 1).
Biomechanics of the Stance Phase
During the stance phase the hoof contacts the ground and the ground reaction force (GRF) vector acts through the centre of pressure (COP) typically moving from initial contact to break-over. The moment arm of the GRF about the DIPJ generates joint moments that must be countered by internal muscular–tendinous forces (F) through the DDFT and associated structures (Eliashar 2007). The internal tendon geometry (line of action, lever arms, angle of deviation around navicular) modulates how those internal forces translate into bone and soft tissue loading (Eliashar 2007; Osborn et al. 2021). The DDFT exerts a constant tensile load on the distal phalanx (P3) and navicular bone, balancing against the upward-directed GRF (Thomason et al., 2001). Small variations in hoof conformation—particularly the palmar angle—influence the magnitude and orientation of these forces (Dyson and Murray, 2007). A positive palmar angle supports efficient energy storage in the DDFT but excessive inclination increases compressive forces on the navicular bone (Thomason and Peterson, 2008).
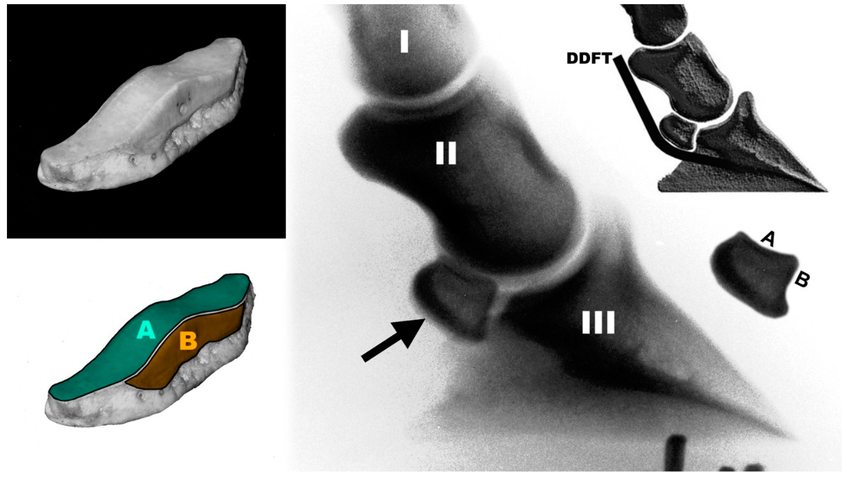
Fig 1. Navicular bone, iso-view, and medio-lateral radiograph (A: joint surface for the middle phalanx, B: joint surface for the hoof bone; I: proximal phalanx, II: middle phalanx, III: hoof (coffin) bone; arrow: navicular bone; DDFT: deep digital flexor tendon).
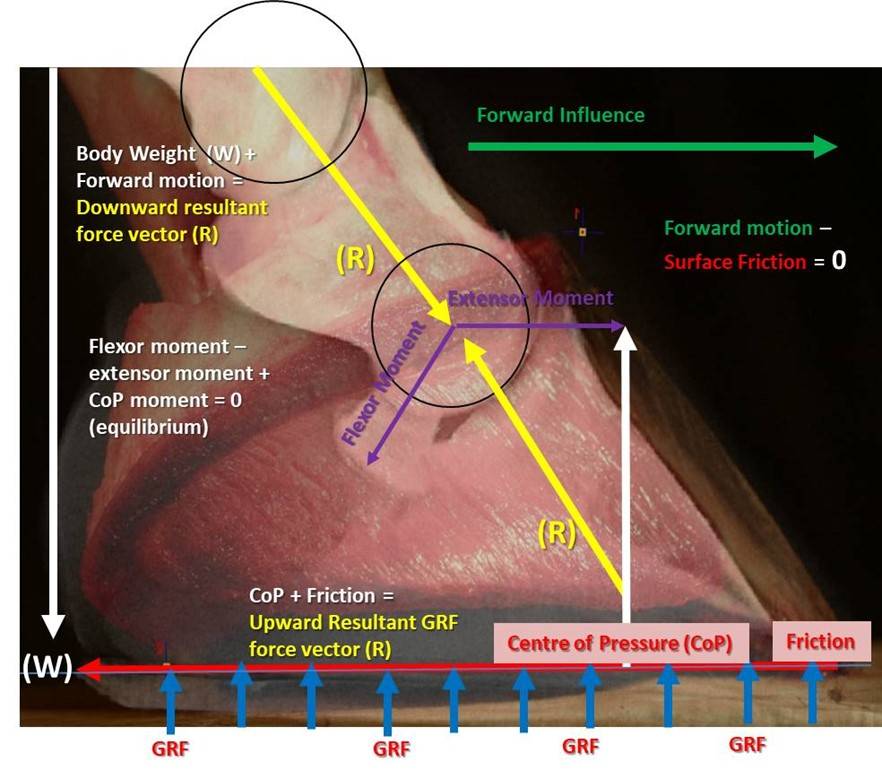
Fig 2. Each linear characteristic influences the force’s effect on the body, and identifying the characteristics of each force applied to a body is an important step in kinetics. Typically farrier’s use the explanation of static equilibrium
Biomechanical Effects of the Full Roller Motion Shoe
The full roller motion shoe modifies the ground contact surface to allow smoother transition of the center of pressure (CoP) during the stance phase. By creating a variable breakover line, the shoe effectively shortens the GRF moment arm acting at the DIPJ (see Figure 1). This adjustment can decrease the torque applied to the DDFT and navicular apparatus, potentially mitigating chronic overload (Eliashar, 2006; Burn et al., 2011).
Static / quasi-static effects on palmar angle
A convex sole mounted shoe increases the effective PA under load because the hoof is “planted” further forward on a curved surface; the distal margin of P3 becomes more plantar relative to the ground. The exact change depends on rocker-radius, position of the apex under the hoof, and loading surface compliance. This in turn changes the DDFT path geometry (tendon-navicular surface angle) and the moment arms about the DIPJ.
Dynamic effects – break-over and contact progression
By virtue of its curved base, the roller shoe facilitates earlier roll of the hoof/sole interface, shortening the duration and magnitude of posterior loading of the toe and reducing the GRF moment arm about the DIPJ (Hagen 2021). This leads to a reduction in required internal moments and potentially lower tendon forces.
Compliance and “self-adjusting” behaviour
On compliant or deformable surfaces the roller shoe may sink or redistribute contact, thus altering the actual PA and roll behaviour dynamically — sometimes unpredictably. The term “self-adjusting” reflects the shoe’s capacity to allow variable PA dependent on contact geometry.
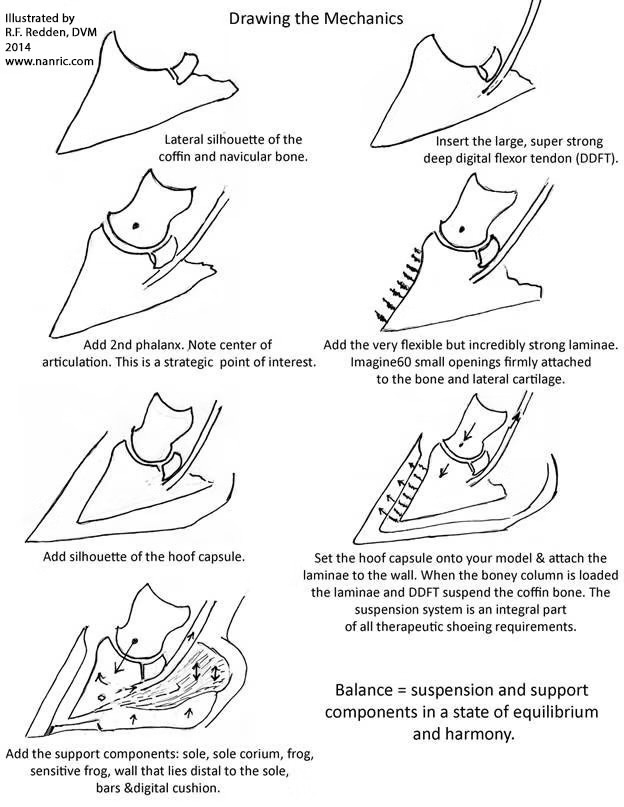
Fig 3. the theoretical bio-mechanical affects of the application of the full roller motion (banana) shoe. After Redden R.
Internal structure and MTU behaviour through stance
We divide the stance phase into three sub-phases: early stance/impact, mid-stance/load carriage, and late stance/break-over.
Early stance (impact → loading response)
Upon initial hoof-ground contact the GRF vector typically has an upward and slightly cranial component; COP is initially more caudal/palmar and migrates during load acceptance (Hagen 2021). The DDFT begins tensioning to oppose the DIPJ moment induced by the GRF moment arm. If PA is higher due to the roller shoe, the DDFT’s line of action enters with a less acute angle relative to the navicular surface, potentially reducing the local contact pressure at this early phase.
Internal structure and MTU behaviour through stance
We divide the stance phase into three sub-phases: early stance/impact, mid-stance/load carriage, and late stance/break-over.
Early stance (impact → loading response)
Upon initial hoof-ground contact the GRF vector typically has an upward and slightly cranial component; COP is initially more caudal/palmar and migrates during load acceptance (Hagen 2021). The DDFT begins tensioning to oppose the DIPJ moment induced by the GRF moment arm. If PA is higher due to the roller shoe, the DDFT’s line of action enters with a less acute angle relative to the navicular surface, potentially reducing the local contact pressure at this early phase.
Mid-stance (load carriage)
GRF magnitude typically increases to its peak in mid-stance; the COP has shifted, the hoof is loaded, and joint angles settle into support. With a roller shoe, the effective GRF moment arm about DIPJ is reduced compared to a flat shoe, thus lowering required internal tendon forces. Consequently the navicular compressive loads (from tendon wrap and DDFT force) may be reduced and distributed more evenly. The tendon-navicular surface angle remains changed (less acute) which may reduce focal stress on the navicular fibrocartilage.
Late stance / break-over
In late stance the hoof transitions to toe-off. A roller shoe induces earlier and smoother roll, which shortens the posterior lever arm and reduces peak internal tendon forces and their rate of change (strain rate) in the DDFT. From a structural perspective this reduces push-off loading of the palmar foot and potentially reduces cumulative microtrauma in the navicular region.
GRF magnitude typically increases to its peak in mid-stance; the COP has shifted, the hoof is loaded, and joint angles settle into support. With a roller shoe, the effective GRF moment arm about DIPJ is reduced compared to a flat shoe, thus lowering required internal tendon forces. Consequently the navicular compressive loads (from tendon wrap and DDFT force) may be reduced and distributed more evenly. The tendon-navicular surface angle remains changed (less acute) which may reduce focal stress on the navicular fibrocartilage.
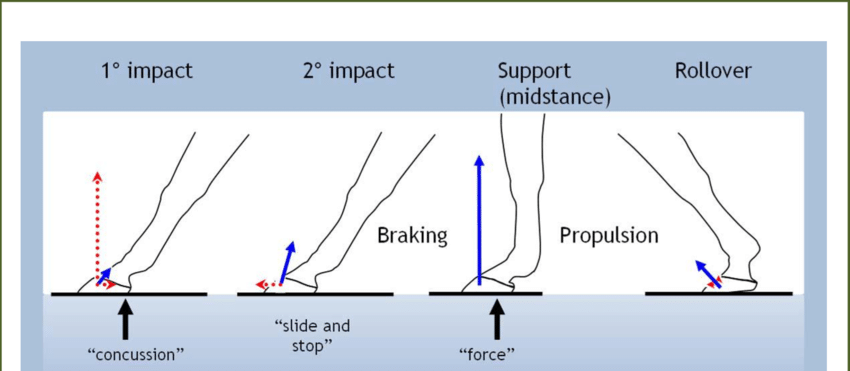
Fig 4. Stages of the stance phase showing the differences in acceleration (red) and ground reaction force (blue). When the blue arrow is tilted, it indicates that both vertical and horizontal components of the ground reaction force are present. The arrow shows the direction in which the ground is pushing the horse (Peterson et al., 2012).
Flexor-tendon surface angle over the navicular — significance
Definition and mechanical implications
The tendon-navicular surface angle is defined as the angle between the DDFT line of action as it wraps over the navicular bone and the palmar cortex of the navicular (or equivalent reference). A more acute angle (i.e., sharper bend) increases the local contact pressure between tendon and bone and increases bending stress in the navicular (McCormick cited in The Horse 2009).
Effects of increased PA on tendon angle
By raising the PA (plantar margin of P3 lower relative to ground) the DDFT enters the navicular region at a less acute angle (i.e., a more favourable geometry) and the tendon wrap radius may be increased, reducing focal stress. Empirical modelling (Eliashar 2007) suggests each degree increase in P3 angle may reduce DDFT force on the navicular by ~4–6%.
Clinical nuance
While an increase in tendon-surface angle is typically viewed as beneficial, excessive alteration of PA may transfer load to other tissues or joints (e.g., DIPJ cartilage, impar ligament). Also, because individual horses vary in conformation, tendon health, and workload, the one-size fits all assumption is unwarranted (Holroyd 2013).
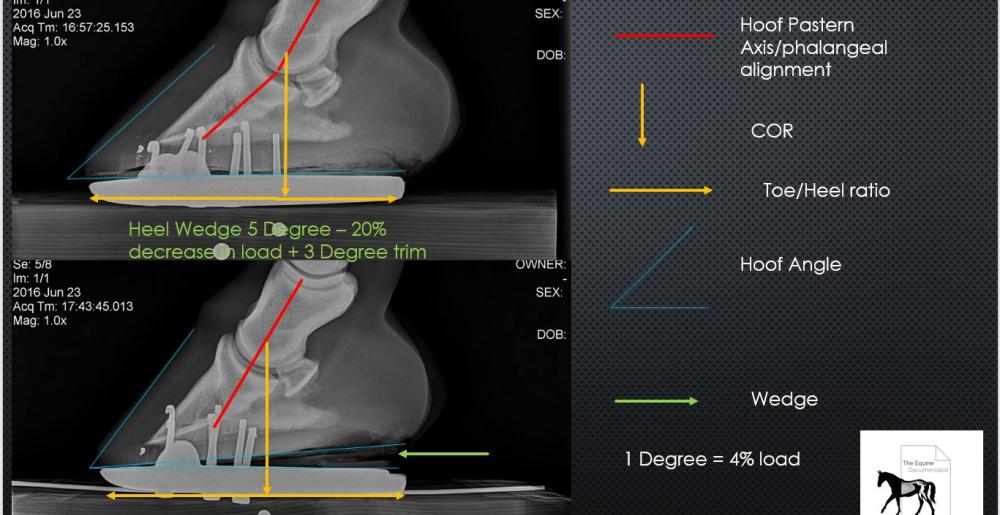
Fig 6. This image shows how trimming, shoe placement and a wedge application helped to create three-dimensional balance around the COR. This is achieved by extending the causal base of support in a palmar direction to equalise base around the position of COR. Subsequently the PA is increased by the addition of an appropriate angled wedge elevation. This can be the inclusion of a proprietary wedge pad in addition to the apex of the roller motion positioned distal to COR. Photo credit Yogi Sharp
The importance of F and GRF vector directions through stance
Vector mechanics fundamentals
At any instant, equilibrium requires that moments and forces from the GRF be countered by internal forces (F) in the MTU and joint reaction forces. The magnitude of internal forces is a function not only of magnitude of GRF, but of its direction, point of application (COP) and lever arm relative to joints. Small changes in vector direction (GRF) or internal line of action (F) can produce large changes in joint moments and tissue loading (Eliashar 2007).
Temporal vector changes and implications for roller shoes
Early stance: GRF with upward/cranial component; COP posterior-medial; internal F just increasing.
Mid-stance: GRF nearly vertical; COP migrating; internal F at near-peak; tendon geometry (angle) stable.
Late stance: GRF shifts cranial/posterior as hoof roll occurs; moment arm about DIPJ increases unless break-over shortened. With a roller shoe, the shift in GRF vector occurs earlier and is smaller in magnitude, reducing the posterior moment arm and required F.
Hence, the roller shoe alters not just static geometry but dynamically changes the timing and direction of GRF and the required internal F vector. This is biomechanically significant for navicular loading and tendon-wrap mechanics.
Clinical ramifications
Understanding these vector changes supports farriery decisions: by designing shoes that shorten the lever arm of GRF and flatten tendon geometry, we can reduce peak loads. Conversely, misalignment of the shoe (e.g., apex too far caudal) or unexpected surface compliance may shift GRF in an unfavourable direction, increasing strain on palmar structures.
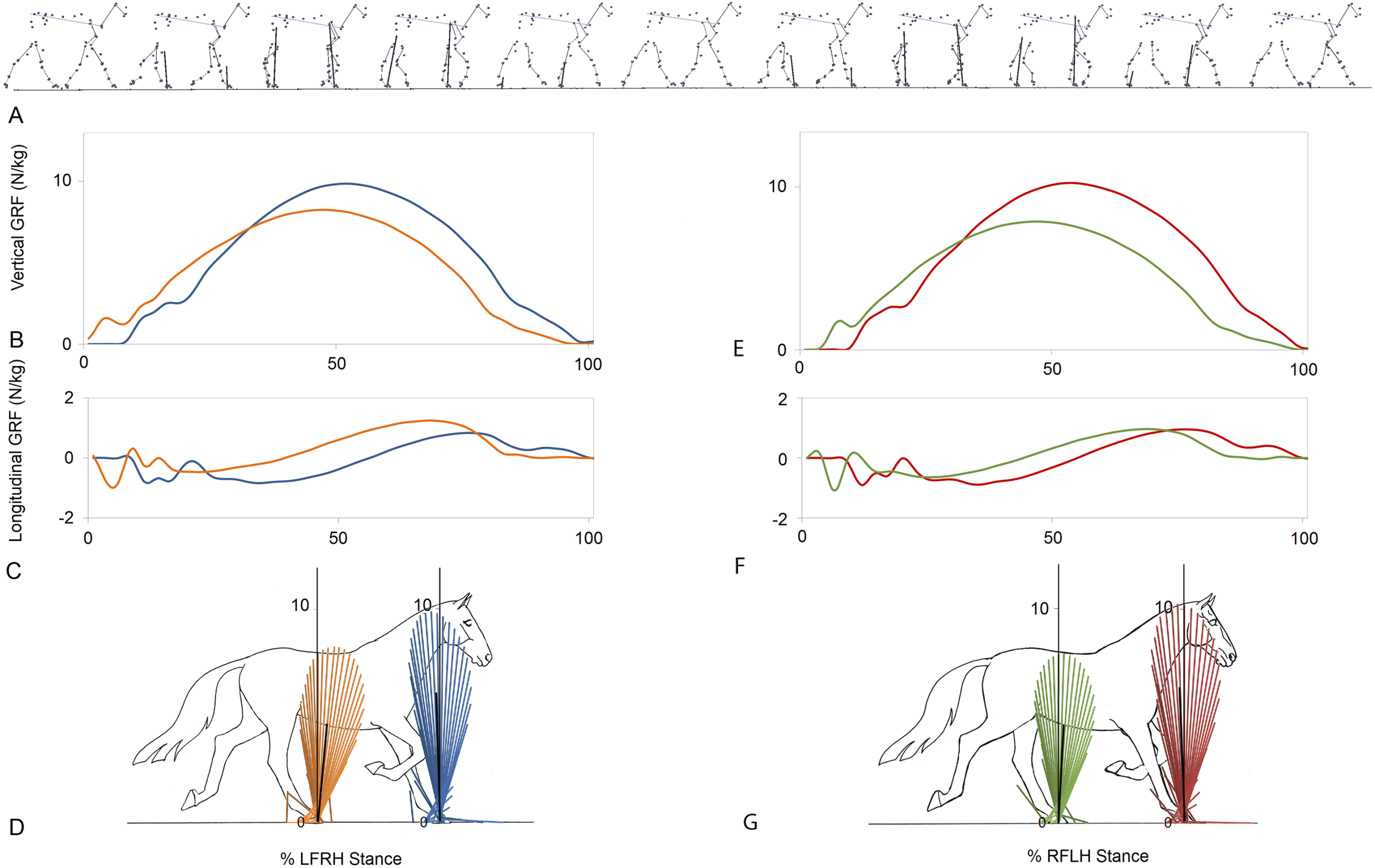
Fig 6. GRFv left fire and right hind through the stance phase a) vertical, b) horizontal and c) in visual limb Fv direction over stance time. . Magnitude over time is reflected by depth of the vector line
Evidence summary
Multiple studies demonstrate that earlier break-over (e.g., rolled-toe shoes) reduces the GRF moment arm about the DIPJ, though not always correlating with reduced navicular force directly (Eliashar et al. 2002).
Retrospective imaging studies show that horses with navicular-region DDFT lesions present with more acute tendon-navicular surface angles than sound horses (McCormick cited in The Horse 2009).
Biomechanical modelling indicates that increasing P3 palmar angle reduces DDFT compressive force on the navicular by ~4–6% per degree in idealised conditions (Equipodiatry review 2007).
However, high-quality in vivo trials testing full roller or SAPAS shoes in horses with palmar foot pain remain scarce; many studies are on sound horses or use cadaveric models (Eliashar 2007).
The vector-based interactions of GRF and F through a roller shoe remain under-reported in peer-reviewed literature — a key research gap.
Therefore, while the mechanical rationale for roller shoes is compelling, the empirical evidence for universal clinical superiority remains moderate.
Practical application guidance
Position the apex of the roller shoe beneath the coffin joint centre to ensure predictable roll and PA change.
Moderate PA increases are preferable; excessive PA may shift load path to other structures.
Consider surface compliance: on soft or deformable surfaces the shoe behaviour (and hence effective PA/moment arms) may change dynamically.
Integrate trimming and whole-limb alignment (heels, pasterns, lower limb conformation) to ensure GRF vector progression and COP migration remain favourable.
Monitor clinically for improvement in pain, hoof-wall/sole growth, and absence of transfer injuries.
Fig7. Practical implications and guidance for fit criteria of the full Roller Motion Shie. photo credit Raymond Battella
Gaps in knowledge and future research
Controlled in-vivo studies of full roller/SAPAS shoes in horses with palmar foot pain, with force-plate, pressure mapping and internal strain measurement.
Time-resolved vector analyses of GRF and internal F (via inverse dynamics) through stance comparing conventional vs roller shoes on variable surfaces and gaits.
Long-term outcome studies stratified by hoof conformation, discipline, surface, and shoe design to identify which sub-groups benefit most and which may be at risk of load-transfer issues.
Cadaveric and finite-element modelling of navicular bone stress under varied tendon-navicular geometry and PA change to refine predictions of injury risk and optimal PA adjustment.
Conclusion
The full roller motion (SAPAS) shoe offers a mechanistically sound method to reduce palmar foot tissue loading by facilitating earlier break-over, raising palmar angle, altering tendon-navicular geometry and modifying GRF/F vector dynamics. While farriery practice and limited evidence support its use in palmar/navicular-related conditions, clinicians should apply it with awareness of individual hoof and limb conformation, surface context and trim/shoe placement. Precision in design and application is key. Further high-quality in-vivo research is required to validate its broad efficacy and delineate best-use cases.
References
- Elias had, E. (2007) ‘An evidence-based assessment of the biomechanical effects of the common shoeing and farriery techniques’, Veterinary Clinics of North America: Equine Practice, 23(3), pp. 523–543
- , E., McGuigan, M.P., Rogers, K.A., Wilson, A.M. (2002) ‘A comparison of three horseshoeing styles on the kinetics of breakover in sound horses’, Equine Veterinary Journal, 34(3), pp. 184-190.
- Hagen, J. (2021) ‘Influence of trimming, hoof angle and shoeing on break-over in the equine forelimb’, Veterinary & Animal Science, [online] doi:10.1002/vetr.450.
- Holroyd, K., et al. (2013) ‘Variation in foot conformation in lame horses with different types of lesion within the foot’, Equine Veterinary Journal, 45(5), pp. 625-631.
- Osborn, M.L., et al. (2021) ‘The equine navicular apparatus as a premier enthesis organ’, Frontiers in Veterinary Science, 8:670511.
Waguespack, R.W. (2010) ‘Navicular syndrome in equine patients: anatomy, causes, diagnosis, and treatment’, Compendium, - Bowker, R.M. (2003). The growth and adaptive capabilities of the hoof wall and sole: Functional changes in response to stress. Equine Veterinary Education, 15(1), 61–72.
- Burn, J.F., Usmar, S.J., and Wilson, A.M. (2011). Hoof kinematics and ground reaction forces of normal horses walking and trotting on a flat concrete surface. Equine Veterinary Journal, 43(2), 213–219.
- Chateau, H., Degueurce, C., Denoix, J.M. (2006). Effects of a rolled toe shoe on the biomechanical parameters of the equine digit during breakover. Equine Veterinary Journal, 38(S36), 692–697.
- Clayton, H.M., Gray, S., Kaiser, L.J., and Bowker, R.M. (2011). Effects of barefoot trimming on hoof morphology. Equine Veterinary Journal, 43(1), 60–65.
- Dyson, S.J. and Murray, R.C. (2007). The influence of foot balance on lameness and performance. Equine Veterinary Education, 19(2), 75–87.
- Eliashar, E., McGuigan, M.P., and Wilson, A.M. (2004). Relationship of foot conformation and force applied to the navicular bone in horses. Equine Veterinary Journal, 36(5), 431–435.
- McGuigan, M.P. and Wilson, A.M. (2003). The effect of dynamic load on the structure and function of the equine foot. Journal of Experimental Biology, 206(21), 3909–3918.
- O’Grady, S.E. and Poupard, D.A. (2001). Physiological horseshoeing: An overview. Equine Veterinary Education, 13(6), 330–337.
- Thomason, J.J., Peterson, M.L., and Plaxton, C. (2001). Morphology of the equine hoof wall and internal structures related to biomechanical function. American Journal of Veterinary Research, 62(6), 775–783.